Author: GotoCloud

ArduCopter SITL (Software-In-The-Loop) Swarm with Mission Planner
https://youtu.be/ppuU9ncZlws SITL Swarm was performed around Yanggak-do Stadium, Pyongyang.
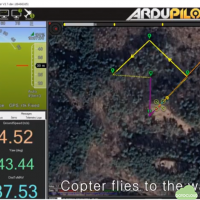
ArduCopter SITL (Software in the Loop) with Mission Planner
https://youtu.be/Vv1WRm6HJ8s ArduCopter SITL was performed with “Mission Start” command. In the real flight, the mission flight can be performed without RC transmitter operation as this […]

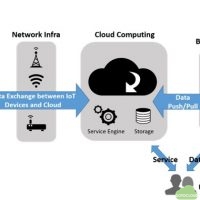
Conceptual design and primitive implementation of telemetry and video transmission over cellular network
Abstract With the increase of drone usage in agriculture, delivery and infrastructure management industries, the need for BVLOS (Beyond Visual-Line-Of-Sight) drone flight also increases. Unlike […]